Design PID Controller for Inverted Pendulum The World Of Control 11:29 10 months ago 328 Далее Скачать
How to Tune a PID Controller for an Inverted Pendulum | DigiKey DigiKey 24:50 11 months ago 62 182 Далее Скачать
MATLAB Simulation of INVERTED PENDULUM | Swing Up & Balance Control | 3D Animation in VRML jitendra singh 0:13 3 years ago 8 782 Далее Скачать
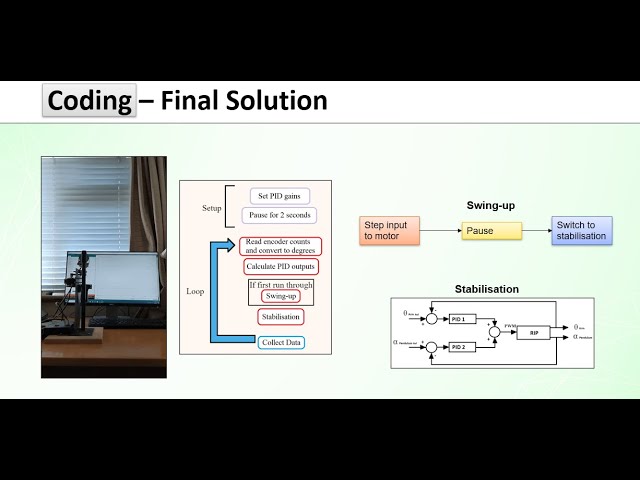
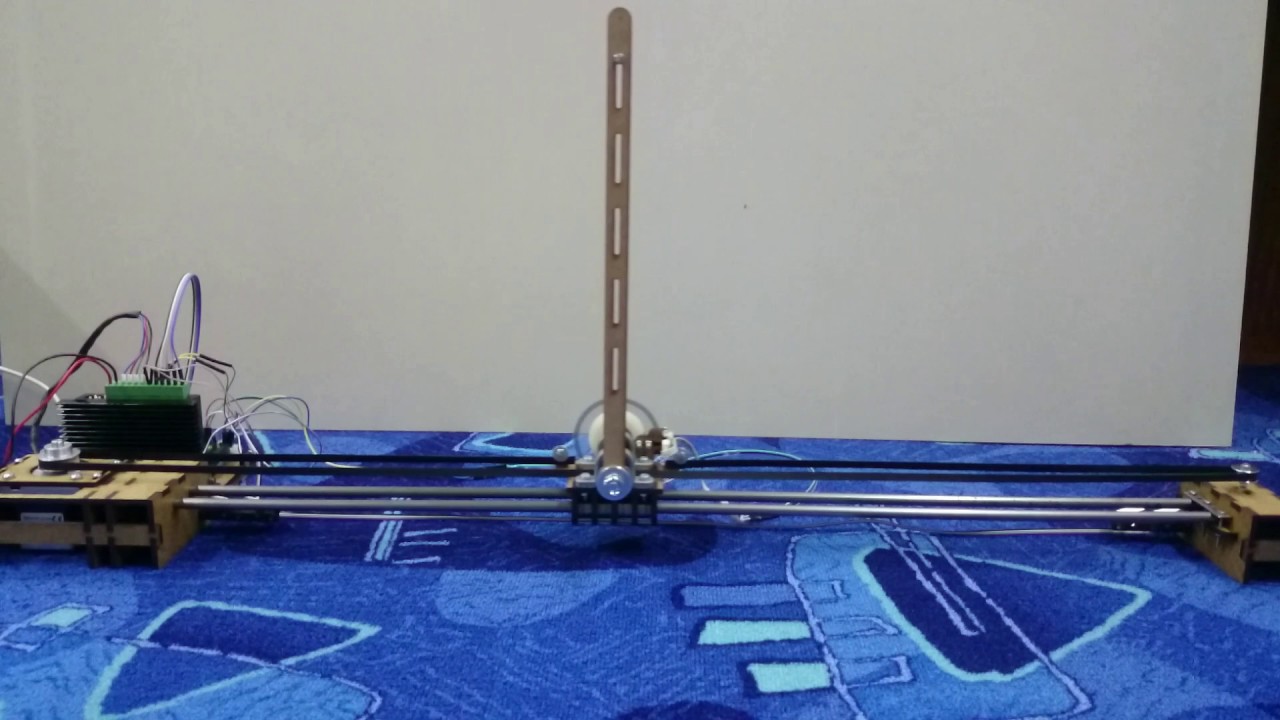
Rotary Inverted Pendulum (PID) - Design, Build, Model, Swing Up and Stabilisation Cillk 11 14:40 4 years ago 3 419 Далее Скачать
Inverted pendulum control, swing up and reference tracking (PID and LQR) Frederik Oestergaard 1:07 2 years ago 12 518 Далее Скачать
Making an Inverted Pendulum - Part 1 of 4: Design and Assembly Philippe Francois 16:34 3 years ago 20 329 Далее Скачать
EEE Project 3: GA Optimized PID controller for Inverted pendulum Dr. Sachin Sharma 11:00 6 years ago 7 966 Далее Скачать
Design a Digital PID controller for Inverted Pendulum look-learn knowledgeable 3:09 1 year ago 255 Далее Скачать
PID Control of Inverted Pendulum in Arduino. System designed From Scratch! Aleksandar Haber 1:01 7 years ago 3 140 Далее Скачать
Double Inverted Pendulum - PID Control: Stabilization Mecharesearch 0:44 5 years ago 412 Далее Скачать
PID control of an inverted pendulum using Arduino Mega 2560 - Odwrócone wahadło Marcin Wisniewski 0:59 9 years ago 45 904 Далее Скачать
Control of Inverted Pendulum on Cart by PID controller [SIMSCAPE, MATLAB] Pratik Prajapati 0:21 5 years ago 646 Далее Скачать